Home /
Expert Answers /
Mechanical Engineering /
the-leg-mechanism-of-a-walking-robot-is-shown-in-figure-1-the-leg-is-mounted-tothe-robot-chassis-th-pa311
(Solved): The leg mechanism of a walking robot is shown in Figure 1. The leg is mounted tothe robot chassis th ...
The leg mechanism of a walking robot is shown in Figure 1. The leg is mounted tothe robot chassis through a revolute joint. Making the mounting chassis a fixed linkdetermine: 1) the number of links in the leg mechanism; 2) the number of joints in themechanism; 3) the mobility of the leg mechanism using the Kutzbach criterion. Notethat P and R represent 1-DOF prismatic joints, and 1-DOF revolute joints.respectively.
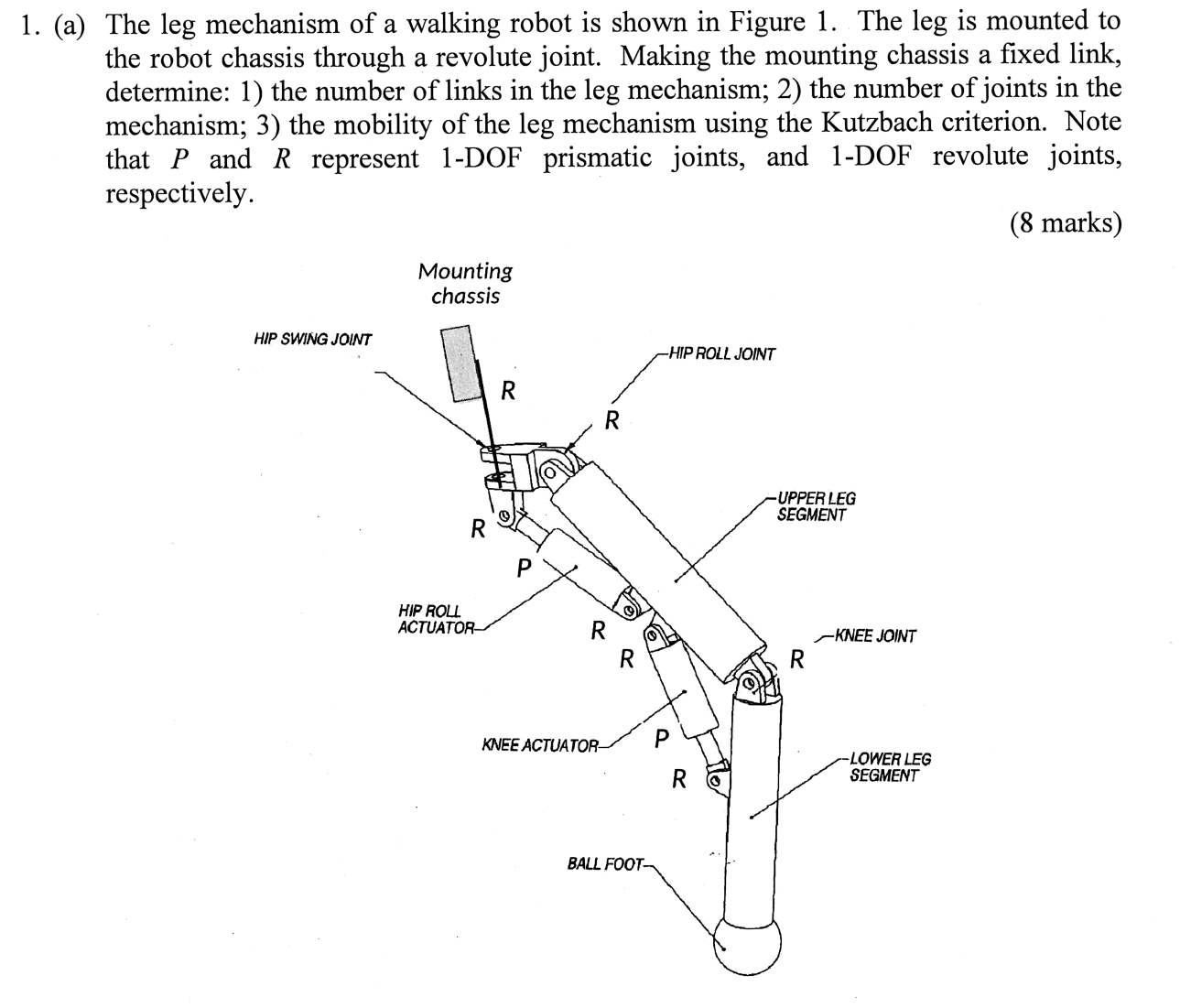
(a) The leg mechanism of a walking robot is shown in Figure 1. The leg is mounted to the robot chassis through a revolute joint. Making the mounting chassis a fixed link, determine: 1) the number of links in the leg mechanism; 2) the number of joints in the mechanism; 3) the mobility of the leg mechanism using the Kutzbach criterion. Note that and represent 1-DOF prismatic joints, and 1-DOF revolute joints, respectively.