Home /
Expert Answers /
Mechanical Engineering /
solve-9-10-refer-2-1-and-3-6-problem-9-10-inverted-pendulum-on-cart-optimum-gains-the-pa571
(Solved): solve 9.10 refer 2.1 and 3.6 Problem 9.10 Inverted pendulum on cart: optimum gains The ...
solve 9.10 refer 2.1 and 3.6
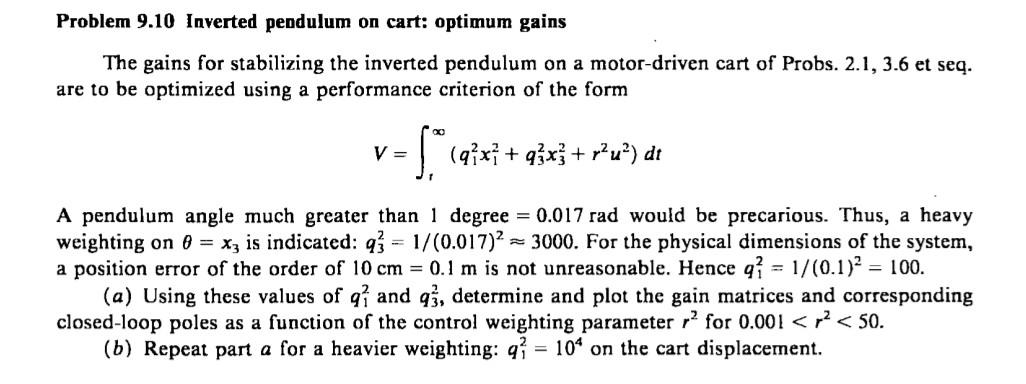
Problem 9.10 Inverted pendulum on cart: optimum gains The gains for stabilizing the inverted pendulum on a motor-driven cart of Probs. 2.1, 3.6 et seq. are to be optimized using a performance criterion of the form A pendulum angle much greater than 1 degree rad would be precarious. Thus, a heavy weighting on is indicated: . For the physical dimensions of the system, a position error of the order of is not unreasonable. Hence . (a) Using these values of and , determine and plot the gain matrices and corresponding closed-loop poles as a function of the control weighting parameter for . (b) Repeat part for a heavier weighting: on the cart displacement.
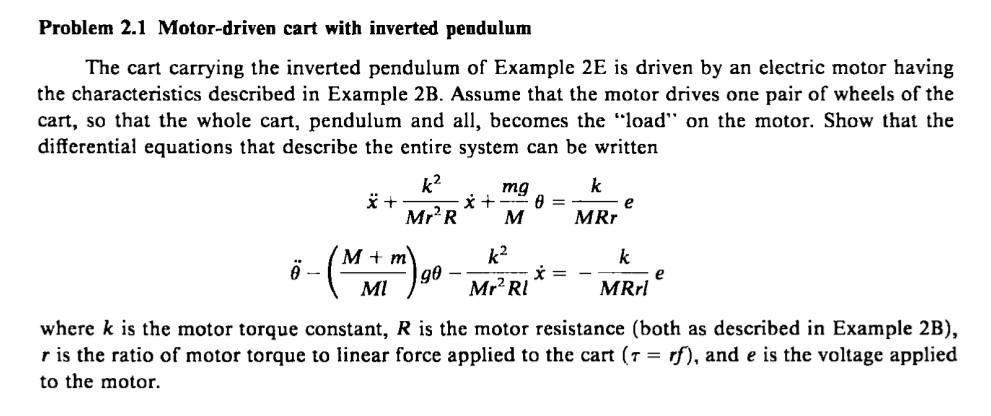
Problem 2.1 Motor-driven cart with inverted pendulum The cart carrying the inverted pendulum of Example is driven by an electric motor having the characteristics described in Example 2B. Assume that the motor drives one pair of wheels of the cart, so that the whole cart, pendulum and all, becomes the "load" on the motor. Show that the differential equations that describe the entire system can be written where is the motor torque constant, is the motor resistance (both as described in Example 2B), is the ratio of motor torque to linear force applied to the cart , and is the voltage applied to the motor.
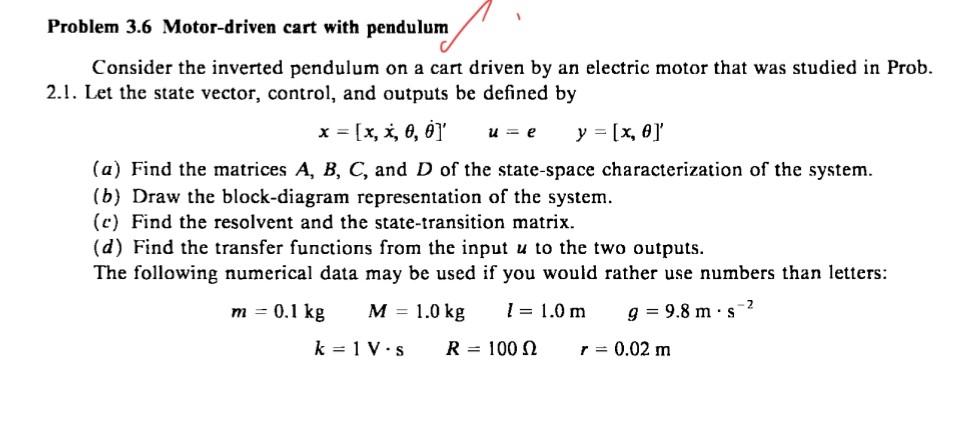
Problem 3.6 Motor-driven cart with pendulum Consider the inverted pendulum on a cart driven by an electric motor that was studied in Prob. 2.1. Let the state vector, control, and outputs be defined by (a) Find the matrices , and of the state-space characterization of the system. (b) Draw the block-diagram representation of the system. (c) Find the resolvent and the state-transition matrix. (d) Find the transfer functions from the input to the two outputs. The following numerical data may be used if you would rather use numbers than letters: