Home /
Expert Answers /
Advanced Math /
provide-matlab-code-for-this-question-1-forward-kinematics-6-for-the-3-dof-arm-shown-in-the-pa687
(Solved): Provide Matlab code for this question 1) FORWARD KINEMATICS (6) For the 3 dof arm shown in the ...
Provide Matlab code for this question
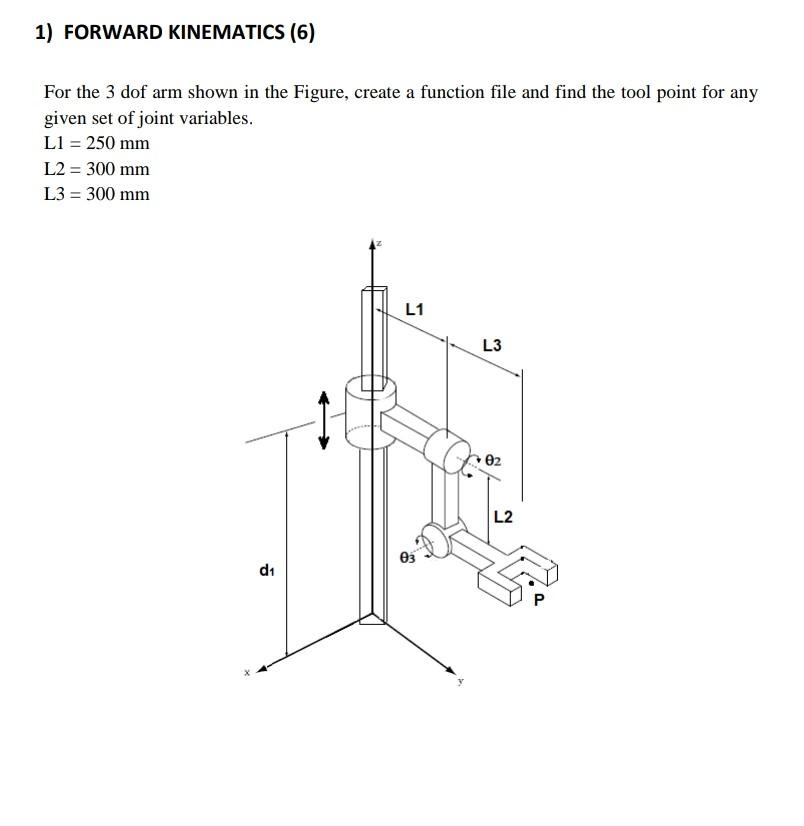
1) FORWARD KINEMATICS (6)
For the 3 dof arm shown in the Figure, create a function file and find the tool point for any
given set of joint variables.
L1 = 250 mm
L2 = 300 mm
L3 = 300 mm
d?
L1
03
L3
02
L2
0
For the 3 dof arm shown in the Figure, create a function file and find the tool point for any given set of joint variables.