Home /
Expert Answers /
Electrical Engineering /
design-a-pid-controller-for-the-system-shown-below-a-formulate-the-required-ideal-derivative-com-pa906
(Solved): Design a PID controller for the system shown below: a. Formulate the required ideal derivative com ...
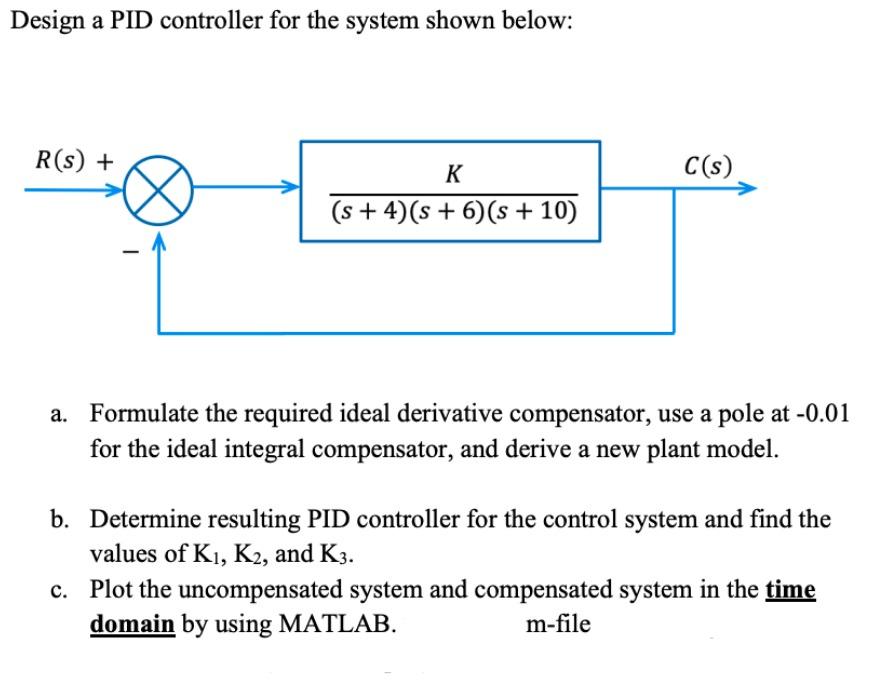
Design a PID controller for the system shown below: a. Formulate the required ideal derivative compensator, use a pole at \( -0.01 \) for the ideal integral compensator, and derive a new plant model. b. Determine resulting PID controller for the control system and find the values of \( \mathrm{K}_{1}, \mathrm{~K}_{2} \), and \( \mathrm{K}_{3} \). c. Plot the uncompensated system and compensated system in the time domain by using MATLAB. m-file
Expert Answer
clear all clc s = tf('s'); %% define K1, K2, K3 K1 = 3.99; K2 = 0.01; K3 = 0.