Home /
Expert Answers /
Mechanical Engineering /
consider-the-following-2d-representation-of-a-robotic-arm-the-end-effector-point-d-needs-to-be-ab-pa918
(Solved): Consider the following 2D representation of a robotic arm. The end effector(point D) needs to be ab ...
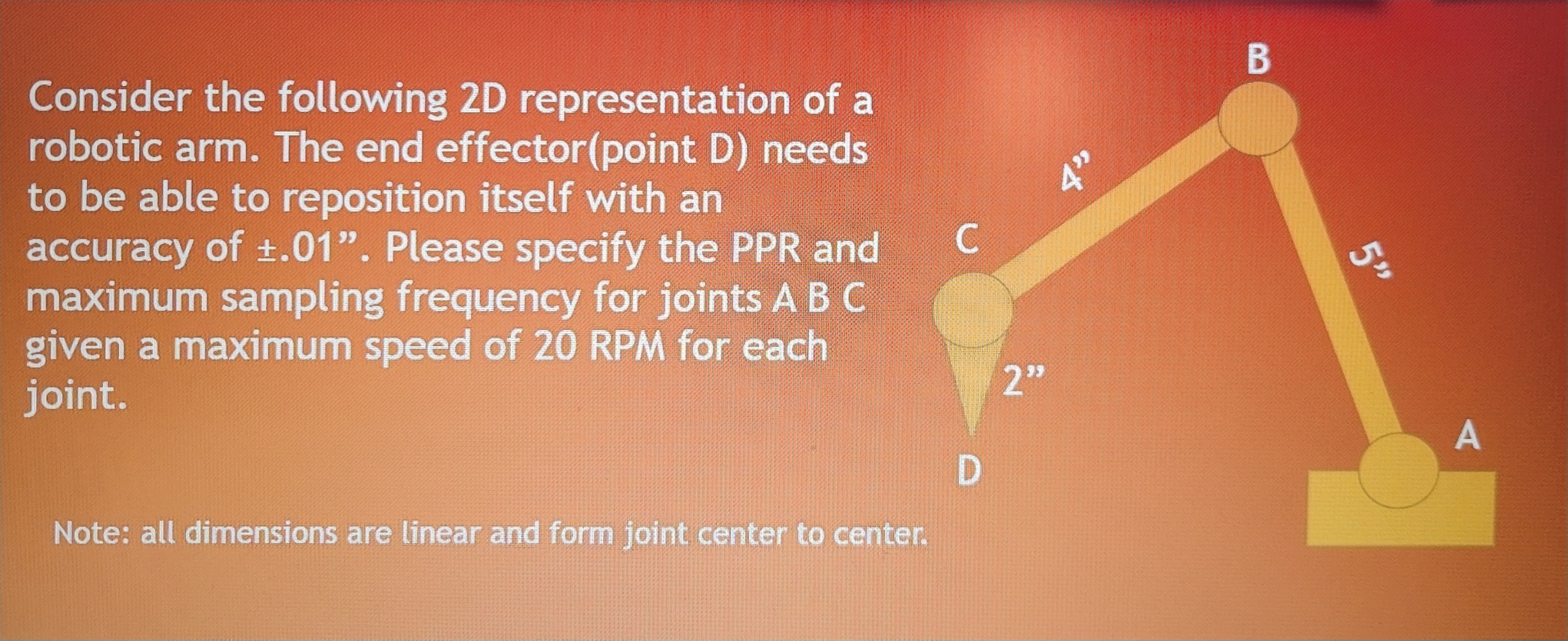
Consider the following 2D representation of a robotic arm. The end effector(point D) needs to be able to reposition itself with an accuracy of \pm .01 ". Please specify the PPR and maximum sampling frequency for joints given a maximum speed of 20 RPM for each joint. Note: all dimensions are linear and form joint center to cente