(Solved): Consider a rotating robot where you can control the angular velocity around a fixed axis. (a) Model ...
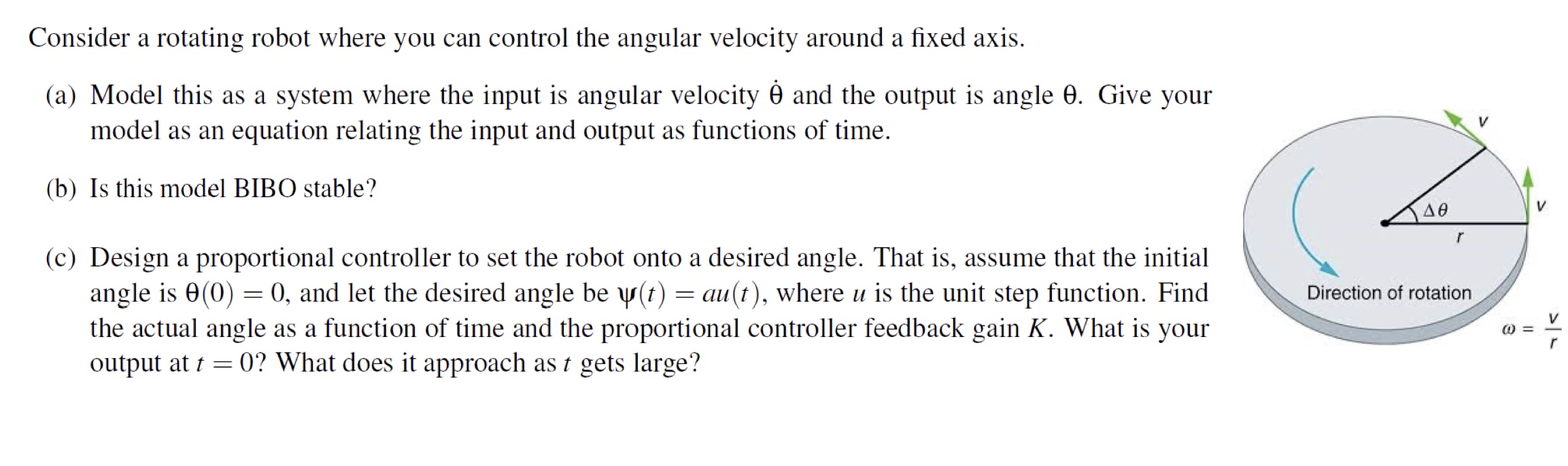
Consider a rotating robot where you can control the angular velocity around a fixed axis. (a) Model this as a system where the input is angular velocity \( \dot{\theta} \) and the output is angle \( \theta \). Give your model as an equation relating the input and output as functions of time. (b) Is this model BIBO stable? (c) Design a proportional controller to set the robot onto a desired angle. That is, assume that the initial angle is \( \theta(0)=0 \), and let the desired angle be \( \psi(t)=a u(t) \), where \( u \) is the unit step function. Find the actual angle as a function of time and the proportional controller feedback gain \( K \). What is your output at \( t=0 \) ? What does it approach as \( t \) gets large? please answer the question on paper in detail steps please