Home /
Expert Answers /
Mechanical Engineering /
a-two-link-planar-robot-has-a-configuration-as-shown-in-figure-q1-which-is-in-pa983
(Solved): A two-link planar robot has a configuration as shown in Figure Q1 which is in ...
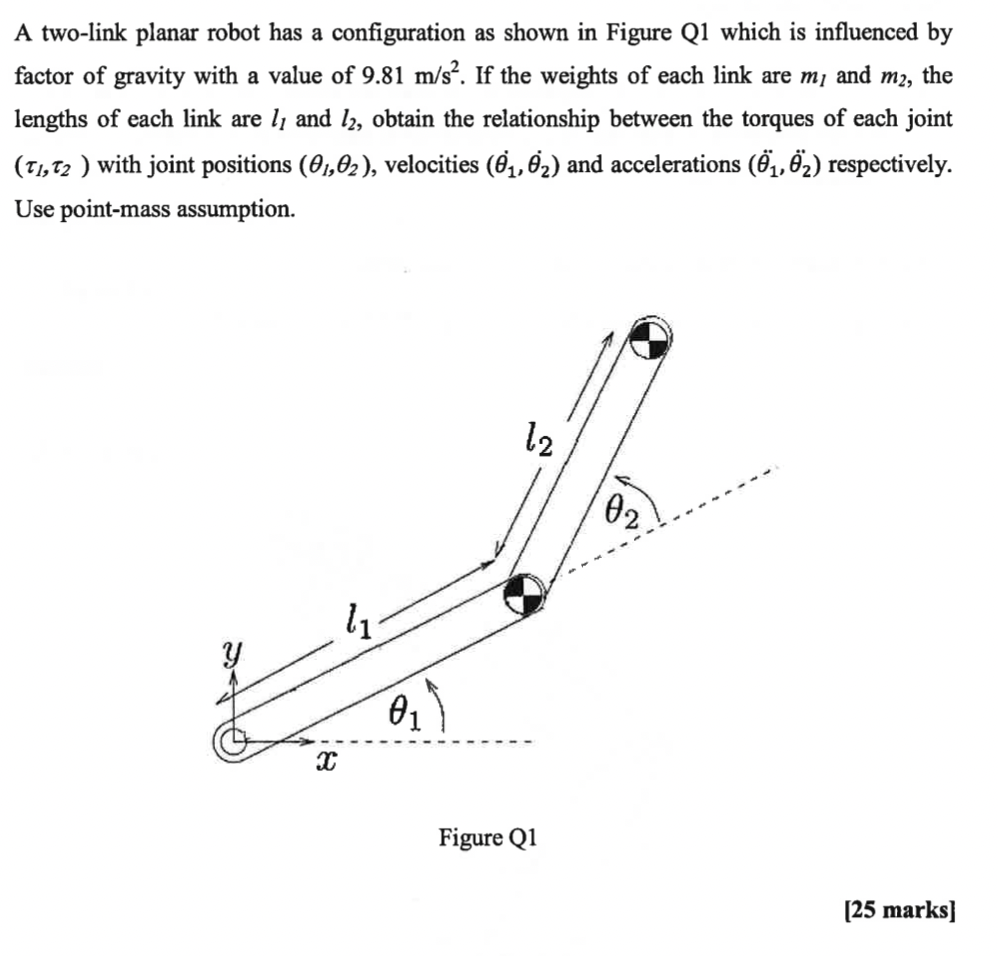
A two-link planar robot has a configuration as shown in Figure Q1 which is influenced by factor of gravity with a value of . If the weights of each link are and , the lengths of each link are and , obtain the relationship between the torques of each joint with joint positions , velocities and accelerations respectively. Use point-mass assumption. Figure Q1 [25 marks]
Expert Answer
Answer: The equations of motion for a two-link planar robot can be derived using the Lagrange method. To do this, w